Los objetivos del proyecto eran automatizar el proceso de emblistado y reducir la necesidad de trabajo manual intensivo en la manipulación y emblistado de productos, pudiendo igualar la velocidad de la máquina moldeadora de blisters. Previamente, el proceso de ordenado y empacado de productos consistía de dos etapas. Primero, para cada línea de producto a emblistar, los estuches debían ser manualmente organizados y puestos en cajas para facilitar el acceso en la siguiente etapa. Luego, un operador inserta los productos en el blister moldeado por la blistera. Este tipo de trabajo manual hace a los operadores más propensos de tener lesiones relacionadas con el trabajo por movimientos repetitivos, ya que decenas de miles de estuches son emblistados cada día.
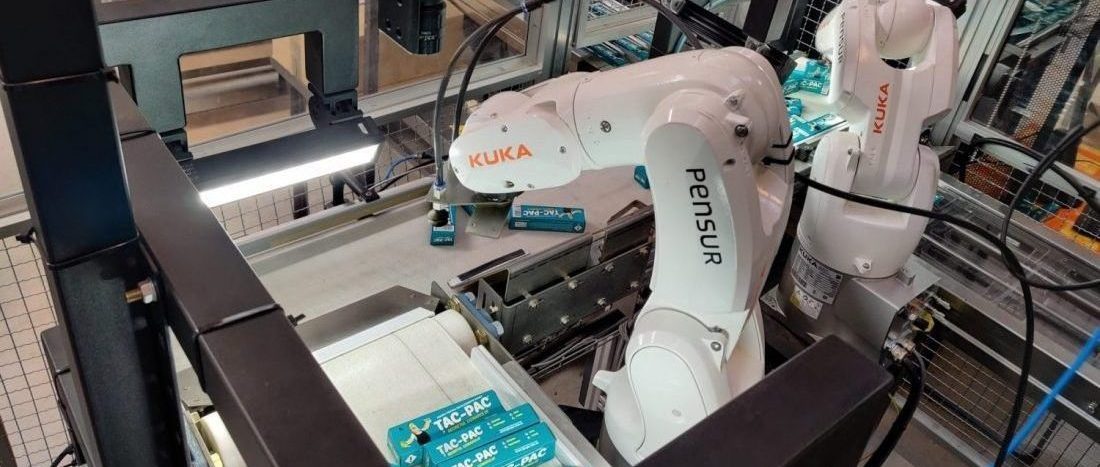
La solución desarrollada por Pensur es un sistema que combina robótica y visión por computadora, en el que dos brazos robóticos son guiados por cámaras industriales utilizando software desarrollado específicamente para esta aplicación.
El sistema recibe los estuches a emblistar en forma desordenada, luego una cinta transportadora los mueve al espacio de trabajo del primer robot, donde una cámara identifica la orientación y posición de cada estuche y le transfiere esta información al robot que los reorienta de modo que queden prontos para emblistar. A continuación, los estuches correctamente orientados son transferidos al espacio de trabajo del segundo robot, donde otra cámara determina la posición de cada estuche, si están correctamente orientados y si están defectuosos en alguna manera. Los estuches correctamente orientados son colocados en los blisters por el segundo robot, coordinandose con la cadencia de la blistera. Todo el proceso automáticamente se ajusta a la velocidad de la blistera y puede alcanzar hasta 45 estuches emblistados por minuto para los más de 30 productos distintos disponibles.
Colocar los estuches dentro de los blisters requiere un error en el pick and place de menos de 0,5mm, por lo que un procedimiento personalizado de calibración entre robots y cámaras fue desarrollado para alcanzarlo.
Adicionalmente, herramientas personalizadas y fáciles de usar para entrenamiento de productos fueron desarrolladas para que el cliente pueda reentrenar el sistema de visión cuando los diseños de los estuches cambian.
Toda la solución fue desarrollada enteramente por Pensur utilizando hardware de nuestros socios estratégicos como Kuka, Lucid Vision, Siemens y Coval.
El sistema de pick genera ahorros de costos y aumenta la productividad y la seguridad de los empleados en la planta al maximizar la eficiencia laboral. Además, el software diseñado a medida para el cliente permite ajustar y entrenar el sistema para mantenerse al día con los cambios de diseños recurrentes y reduciendo el tiempo de inactividad.

Casos de éxitos / Aplicaciones especiales / AI




