El objetivo del proyecto era automatizar el armado y cerrado de cajas de cartón para reducir el tiempo que requiere esta tarea y aumentar la eficiencia en la producción. Previamente, el proceso armado de cajas requería que dos operadores dedicaran varias horas a armar todas las cajas necesarias para la producción del turno. El cerrado de las cajas en ambos lados se realiza utilizando pegamento caliente, lo que también exponía a los operadores a un riesgo por quemaduras.
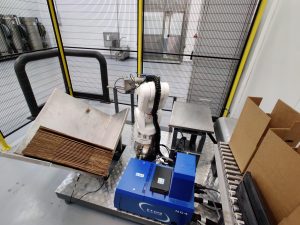
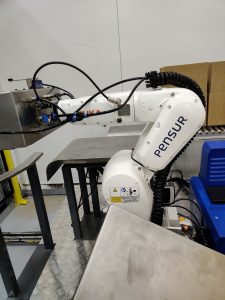
La solución desarrollada por Pensur utiliza un robot Kuka de 6 ejes junto con un gripper especialmente diseñado y patentado para la manipulación de cajas de cartón, además de un sistema de hotmelt Valco Melton para el sellado de las cajas.
El sistema trabaja con cajas de cartón formato FEFCO 203 en 3 tamaños distintos pero puede ser configurado para cualquiera de los formatos FEFCO 201-206 y tamaños entre 200 x 150 x 150 mm – 600 x 400 x 350 mm. Las cajas son colocadas en una estructura que permite alinearlas correctamente y son tomadas una a una por el robot utilizando el gripper con un sistema de vacío. El robot luego utiliza distintas estructuras fijas para desplegar la caja, plegar las solapas en orden y finalmente se le aplica el hotmelt para cerrar la cara inferior. Por último, la caja es depositada en una cinta transportadora y el robot procede a armar una nueva. Las cajas son llenadas con el producto por un operario, que luego utiliza un aplicador manual de hotmelt, conectado al mismo tanque de la máquina, para cerrar la cara superior.
El armado de cajas puede ser a demanda o a una cadencia fija con una velocidad máxima de 12 cajas/min en promedio. Además, el hotmelt puede sustituirse por cinta adhesiva como método de cerrado de las cajas con modificaciones menores.
Una ventaja importante es que el armador de cajas solamente cuenta con un sistema móvil que es el robot industrial, que es muy confiable y requiere poco mantenimiento, eliminando posibles puntos de falla. Adicionalmente, cuenta con varios sensores para detectar falta de suministros, errores en el armado y permite cambio de formato sin ningún ajuste manual.
El armador de cajas robótico permitió aumentar la productividad, reduciendo el tiempo que los operarios debían invertir para únicamente armar cajas. Además, se logró una mejora importante en seguridad para los operarios, gracias a la robustez y seguridad del equipamiento dispensador de hotmelt.

La planta de refinado de azúcar de Azucarlito, durante el proceso de refinado y envasado trabaja 24 horas al día, envasando y paletizando 7 formatos distintos de bolsas de azúcar a un máximo de 1500 bolsas por hora. Originalmente, esta tarea requería de una rotación importante de personal por el desgaste físico de cargar bolsas de hasta 25 Kg.
Se planteó automatizar el proceso de paletizado utilizando robots para lograr siempre resultados consistentes y eliminar las tareas más físicamente exigentes que pueden causar problemas de salud a largo plazo.
La solución diseñada por Pensur consta de 2 robots paletizadores Kuka KR120 R3200 PA trabajando en paralelo, uno dedicado únicamente a las bolsas de 25 Kg de consumo industrial, trabajando a una cadencia máxima de 700 bolsas por hora, y otro dedicado a los 6 formatos de fundas de bolsas de azúcar para consumo final, trabajando a una cadencia máxima de 800 fundas por hora.
Ambos robots utilizan grippers diseñados por Pensur que integran tecnología de vacío de Coval para tomar las bolsas utilizando succión, que hace el proceso más rápido, sencillo y fácil de mantener que una garra mecánica. Ambos robots utilizan el mismo gripper de vacío para también manipular los cartones separadores, que colocan en las capas correspondientes acorde al formato seleccionado. Adicionalmente, el robot paletizador de fundas de paquetes de azúcar puede armar dos pallets distintos a la vez de formatos distintos, para un total de tres diferentes líneas de paletizado separadas.
Además de los robots, la celda de paletizado cuenta con un dispensador de pallets y un sistema de transportes que alimentan pallets vacíos a los robots automáticamente, reduciendo al mínimo el tiempo de cambio entre la salida de un pallet completo y el comienzo de uno nuevo.
Todo el sistema funciona de forma automática y pueden operarse ambos robots de forma independiente. Para la selección de formatos y comandos se cuenta con múltiples estaciones de control alrededor de la celda y una pantalla para gestionar configuraciones y ver estadísticas y eventos.
Dada la alta velocidad de trabajo y el alcance y fuerza de los robots, la seguridad es un tema de inmensa importancia. La celda cuenta con múltiples puertas con bloqueo y monitoreo, pulsadores de emergencia y barreras de seguridad láser con muting para la salida de pallets completos. Todos estos sensores junto con un análisis de seguridad y correcta implementación de los estándares de seguridad hacen que el sistema sea excepcionalmente seguro para los operadores.
Durante todo el proceso de diseño, instalación y puesta en marcha se trabajó de forma cercana con el cliente para adaptar cada aspecto del proyecto a sus necesidades y forma de trabajar.
Se logró implementar el sistema de paletizado con múltiples formatos de bolsas de azúcar de una forma robusta y eficiente, aprovechando al máximo el espacio disponible. Gracias a la utilización de robots industriales y componentes de primer nivel, el sistema trabaja sin interrupciones ni intervenciones mayores. La implementación del sistema de paletizado permitió mejorar tanto la consistencia del paletizado como la seguridad de los operadores, con la flexibilidad de poder hacer modificaciones de formato a futuro que solamente implican cambios de software.

Un productor que cuenta con centenares de chacras y múltiples variedades de granos tiene en la logística un aspecto clave de la cosecha. Cada día los responsables deciden qué chacras van a cosechar y cuántas cosechadoras se van a utilizar en cada lugar. A medida que se va cosechando, la flota de camiones va siendo despachada para cada locación, a cargar el producto cosechado, para luego volver a los silos y comenzar nuevamente.
El proceso se realiza de manera manual, asignando los camiones, contactando a los conductores para indicarles las chacras a las que debían ir una a una, realizando seguimiento de los estados de los camiones y de las chacras, y registrando todo en un pizarrón en el centro logístico. Este tipo de gestión es poco escalable, ya que, a medida que aumenta la cantidad de camiones y chacras, es muy difícil mantener el estado de situación actualizado y asignar de manera efectiva los camiones a las chacras. A su vez, hay una fuerte dependencia de las personas y su habilidad de gestión.
La solución desarrollada por PENSUR es un sistema práctico y sencillo de manejar que mejora considerablemente la gestión y los tiempos de los procesos, minimizando los errores que pueden darse por manejos humanos.
Consiste en un algoritmo inteligente de asignación a medida, que combina la mensajería instantánea a través de un bot de Telegram y una plataforma de visualización, en un sistema automático de gestión de la flota. El sistema se inserta como un miembro más del equipo de trabajo, indicando, gestionando y respondiendo acorde al avance y cambios de la situación.
Cuando comienza el día, los encargados seleccionan en el bot las chacras habilitadas para cosecha y le avisan al sistema que ya puede comenzar a enviar camiones. Para cada chacra, se puede ingresar parámetros del grano y de las cosechadoras seleccionadas, ver el estado de la chacra con los camiones asignados, ver cuántos camiones ya fueron entregados en el día, entre otras funciones.
El sistema, tomando en cuenta las necesidades de camiones de cada chacra, en base a la información de estado de cada una y la cantidad de camiones disponibles, asigna destino a los conductores. El algoritmo busca mantener las distintas locaciones abastecidas de camiones para nunca tener que frenar las cosechadoras, optimizando el flujo de camiones para que nunca falten o sobren, tomando en cuenta los parámetros de cada cosecha, así como las particularidades del día (como ser, atrasos, enfermedades, accidentes, clima, etc.). Al conductor le llega a su teléfono la ubicación de la chacra e información de contacto. El sistema mantiene el estado de su viaje actualizado.
El estado de todos los viajes, las chacras, las cosechadoras y del producto entregado, puede verse en una plataforma de visualización. Aquí es posible consultar tanto la información en tiempo real, como histórico, e indicadores que ayudan a la planificación de la cosecha.

La planta de embotellado de Coca Cola FEMSA en Montevideo es de las pocas en el mundo que utilizan envases de PET retornables, lo que les permite reutilizar los envases retornados por los clientes para embotellar sus bebidas de una forma eco-amigable, pero no todos los envases son retornados y no todos los retornados están en condiciones de ser reutilizados. Por ese motivo se deben ingresar envases nuevos a la línea de embotellado para compensar los perdidos.
El desafío en esto es en primer lugar la ergonomía, los pallets de botellas que se reciben para ingresar a la línea miden más de 2 metros de altura, con 6 niveles de envases y 121 botellas por nivel, esto complicaba el proceso manual de descargar las botellas y colocarlas en la línea para los operarios. Por otro lado, el segundo desafío era la velocidad, que para alcanzar las 16.000 botellas por hora requeridas se precisaban múltiples operarios.
Se planteó automatizar este proceso para lograr abastecer a la línea con una intervención mucho más reducida de los operadores.
La solución diseñada por Pensur consta de de un robot paletizador Kuka KR120 R3200 PA utilizando un gripper diseñado y fabricado a medida por Pensur para esta aplicación. Este gripper le permite al robot agarrar una fila entera de 121 envases vacíos a la vez utilizando accionamientos neumáticos y retirar el cartón separador utilizando un sistema de vacío. Además, utiliza el mismo gripper para manipular los pallets vacíos y apilarlos para su retiro por un montacargas.
El sistema opera de forma automática en coordinación con la línea de llenado, que le indica si debe ingresar envases. Un sistema de transportadores de pallets se encarga de ingresar los pallets a la celda y de dejar disponible un pallet nuevo para despaletizar siempre que haya disponibles. Solo se requiere intervención de un operador que, luego de que se carga un pallet de envases en el transporte de ingreso, debe retirar el envoltorio de film y dar la orden de ingreso.
El despaletizador cuenta con un panel de control para dar comandos al sistema, hacer configuraciones y ver estadísticas y eventos. Adicionalmente se implementó la comunicación de estadísticas y estado del equipo al SCADA de planta.
Para el diseño e implementación del despaletizador se realizaron análisis de riesgo y se siguieron las normativas de seguridad más exigentes. Todas las puertas de ingreso a la celda cuentan con bloqueo con monitoreo, múltiples pulsadores de emergencia y la entrada de pallets cuenta con una barrera de seguridad láser con muting. Además, aplicaron buenas prácticas de seguridad para la programación del sistema, especialmente en los eventos que hay ingresos a la celda para garantizar la seguridad de los operarios.
Durante todo el proceso de diseño, instalación y puesta en marcha se trabajó de forma cercana con el cliente para adaptar cada aspecto del proyecto a sus necesidades y forma de trabajar.
Se implementó un sistema despaletizador que cumple con todos los requisitos y tiene capacidad de aumentar la productividad si fuera necesario. El gripper diseñado y construido por Pensur permitió tener la herramienta perfecta para la aplicación sin comprometer en otros aspectos. Finalmente, el despaletizador permitió reducir la cantidad de personal ocupado en la tarea de ingreso de nuevos envases a la línea de REFPET.

Los objetivos del proyecto eran automatizar el proceso de emblistado y reducir la necesidad de trabajo manual intensivo en la manipulación y emblistado de productos, pudiendo igualar la velocidad de la máquina moldeadora de blisters. Previamente, el proceso de ordenado y empacado de productos consistía de dos etapas. Primero, para cada línea de producto a emblistar, los estuches debían ser manualmente organizados y puestos en cajas para facilitar el acceso en la siguiente etapa. Luego, un operador inserta los productos en el blister moldeado por la blistera. Este tipo de trabajo manual hace a los operadores más propensos de tener lesiones relacionadas con el trabajo por movimientos repetitivos, ya que decenas de miles de estuches son emblistados cada día.
La solución desarrollada por Pensur es un sistema que combina robótica y visión por computadora, en el que dos brazos robóticos son guiados por cámaras industriales utilizando software desarrollado específicamente para esta aplicación.
El sistema recibe los estuches a emblistar en forma desordenada, luego una cinta transportadora los mueve al espacio de trabajo del primer robot, donde una cámara identifica la orientación y posición de cada estuche y le transfiere esta información al robot que los reorienta de modo que queden prontos para emblistar. A continuación, los estuches correctamente orientados son transferidos al espacio de trabajo del segundo robot, donde otra cámara determina la posición de cada estuche, si están correctamente orientados y si están defectuosos en alguna manera. Los estuches correctamente orientados son colocados en los blisters por el segundo robot, coordinandose con la cadencia de la blistera. Todo el proceso automáticamente se ajusta a la velocidad de la blistera y puede alcanzar hasta 45 estuches emblistados por minuto para los más de 30 productos distintos disponibles.
Colocar los estuches dentro de los blisters requiere un error en el pick and place de menos de 0,5mm, por lo que un procedimiento personalizado de calibración entre robots y cámaras fue desarrollado para alcanzarlo.
Adicionalmente, herramientas personalizadas y fáciles de usar para entrenamiento de productos fueron desarrolladas para que el cliente pueda reentrenar el sistema de visión cuando los diseños de los estuches cambian.
Toda la solución fue desarrollada enteramente por Pensur utilizando hardware de nuestros socios estratégicos como Kuka, Lucid Vision, Siemens y Coval.
El sistema de pick genera ahorros de costos y aumenta la productividad y la seguridad de los empleados en la planta al maximizar la eficiencia laboral. Además, el software diseñado a medida para el cliente permite ajustar y entrenar el sistema para mantenerse al día con los cambios de diseños recurrentes y reduciendo el tiempo de inactividad.
Programación en PLCs , realización de ingeniería y modificaciones eléctricas en sopladores.
Modificación de planos
Revisión de la secuencia de soplado.
Supervisión de los trabajos eléctricos.

Programación de procesos CIP de Empacadora, Mixer y llenadora en lineas de producción, considerando procesos en 3 y 5 etapas de lavado tanto en caliente como en frio.
Duración del trabajo: 60 días
![]()
![]()

Programación de PLCs, pantallas HMI, configuraciones de variadores, arrancadores y relés inteligentes de dos calderas instaladas por el contratista Berkes en la planta de Villa Rodríguez de la empresa Conaprole.
Realización de pruebas FAT del sistema de control.
Acompañamiento en la puesta en marcha de ambas calderas.
Proyección, diseño e implementación de un sistema remoto de apagado de cargas de planta.
Actualización de PLC existentes, programación e instalación de HMIs, asegurando la comunicación entre el operador en el sector de Fuel System quien podrá, de forma controlada, hacer una parada remota.
Vinculación de 15 maquinas con el Fuel System.
Duración del trabajo: 75 días

![]()
Montaje y puesta en marcha de linea de ensamblado adquirida originalmente en China por el cliente.
Se analizo que lo adquirido concuerde y aplique al proyecto original y cumpla los objetivos requeridos por el cliente según las necesidades puntuales verificando que todas sus partes, componentes tanto de hardware como de software apliquen a la necesidad de este proyecto.
Realización de montaje eléctrico confeccionando un estricto plan de seguridad acompañado por un prevencionista en obra.
Verificación de Redes y acompañamiento de un ingeniero de control en la puesta en marcha.
Confección de documentación final.
Duración de trabajo: 45 días
Monitoreo de planta a través de equipamiento Oceasoft específicamente desarrollado a medida con el objetivo de cumplir los requisito de Data Integrity del cliente, respetando la normativa CFR 21 parte 11.
De esta manera el cliente controla y asegura estrictos valores de Temperatura y Humedad dentro de sus instalaciones lo cual es critico para este tipo de industria.
Como valor agregado se realizo un respaldo automático cada 24 hs y visualización desde cualquier dispositivo móvil.
La arquitectura de este proyecto fue la siguiente:

Para este proyecto se incluyo la ingeniería, instalación, programación y capacitación con un opcional de verificación trimestral.
Duración del trabajo : 40 Días
![]()
![]()